材料沉积喷墨打印及
涂层系统解决方案
材料沉积喷墨打印及
涂层系统解决方案
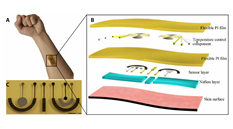
介绍软致动器多选用可拉伸弹性体材料以实现机械顺应性,在许多软驱动原理中,静电驱动致动器具有效率、速度和无声操作方面的优异性能,但是需要高电场。拉链致动器允许特别高的能量密度,并提供了更多的柔性但通常选用不可拉伸材料。液压放大Taxel(HAXEL)技术结合了拉链电极和可拉伸材料,由边缘的柔性箔和中心的可拉伸薄膜组成的空腔用于填充介电液体。柔性箔上可沉积图案化的电极,当施加电压时形成压缩使介电液体从外围移动到可拉伸的中心区域从而形成凸块。宽度小于10mm、厚为1mm、重量为90mg的致动器可产生300mN的力和500µm平面外位移,比功率为100W/kg。HAXEL技术在触觉反馈系统、复杂流体阵列和软机器人有广泛应用。
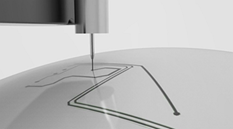
如图3为执行器制造的主要步骤。在MicroFab的Jetlab 4上进行喷墨打印。制作分9个步骤进行,打印单层PDMS,液滴和线之间的间距为100µm。产物如图4所示。
 流体通道打开过程如图5所示,该装置被浸在乙醇浴中,使用气动控制器将乙醇加压至50mBar,然后将乙醇浴置入超声中10分钟,以加速牺牲材料的去除,如图6所示,I)制造后的装置俯视图;II)打开过程中的设备照片;III)打开装置的照片。
▲ 图5
▲ 图6
 结论初次使用喷墨打印来制造HAXELs的关键层。喷墨打印了牺牲材料以及可拉伸层的PDMS,以获得驱动和填充的流体特性。研究展示了迈向更复杂的HAXEL阵列的 一步。目前,成对致动器是流体连接的,未来的发展将使用一个通用的流体系统来填充HAXEL致动器的NxN阵列,在关闭通道后将移除宽管入口。未来的器件将通过用喷墨打印的柔性电介质代替聚酯薄膜来制造,从而实现完全添加制造过程,拥有完全的设计灵活性。对触觉反馈系统、复杂流体阵列和软机器人的应用提供有力支持。 参考文献: [1] Giulio Grasso, Samuel Rosset, Herbert Shea, "Fabrication of zipping electrostatic actuators incorporating inkjet-printed layers," Proc. SPIE 11587, Electroactive Polymer Actuators and Devices (EAPAD) XXIII, 115871O (22 March 2021). ____________________________________________________________________________________________________________________________ p.s.为保持服务的专业性及稳定性,烦请通过以下方式与睿度光电联系,咨询邮箱:service@rd-mv.com,电话:+86-21-51816409。非常感谢您的关注,期盼与您合作并探索更多可能。 |